Búsqueda semántica
De OHO - search engine for sustainable open hardware projects
Debug output SQLStore
ASK Query
[[Categoría:Robótica]]
SQL Query
SELECT DISTINCT
t0.smw_id AS id,
t0.smw_title AS t,
t0.smw_namespace AS ns,
t0.smw_iw AS iw,
t0.smw_subobject AS so,
t0.smw_sortkey AS sortkey, t0.smw_sort,idst4.smw_sort
FROM
`smw_object_ids` AS t0
INNER JOIN
`smw_fpt_inst` AS t1 ON t0.smw_id=t1.s_id
LEFT OUTER JOIN
(`smw_di_wikipage` AS t4
INNER JOIN
`smw_object_ids` AS idst4 ON idst4.smw_id=t4.o_id) ON t0.smw_id=t4.s_id
AND (t4.p_id=53921)
WHERE
(t1.o_id=566)
AND t0.smw_iw!=':smw'
AND t0.smw_iw!=':smw-delete'
AND t0.smw_iw!=':smw-redi'
ORDER BY
idst4.smw_sort DESC , t0.smw_sort ASC
LIMIT
55
OFFSET
0
t0.smw_id AS id,
t0.smw_title AS t,
t0.smw_namespace AS ns,
t0.smw_iw AS iw,
t0.smw_subobject AS so,
t0.smw_sortkey AS sortkey, t0.smw_sort,idst4.smw_sort
FROM
`smw_object_ids` AS t0
INNER JOIN
`smw_fpt_inst` AS t1 ON t0.smw_id=t1.s_id
LEFT OUTER JOIN
(`smw_di_wikipage` AS t4
INNER JOIN
`smw_object_ids` AS idst4 ON idst4.smw_id=t4.o_id) ON t0.smw_id=t4.s_id
AND (t4.p_id=53921)
WHERE
(t1.o_id=566)
AND t0.smw_iw!=':smw'
AND t0.smw_iw!=':smw-delete'
AND t0.smw_iw!=':smw-redi'
ORDER BY
idst4.smw_sort DESC , t0.smw_sort ASC
LIMIT
55
OFFSET
0
SQL Explain
| ID | select_type | table | type | possible_keys | key | key_len | ref | rows | filtered | Extra |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | SIMPLE | t1 | ref | s_id, o_id, s_id_2, o_id_2 | o_id_2 | 5 | const | 152 | Using index; Using temporary; Using filesort | |
| 1 | SIMPLE | t0 | eq_ref | PRIMARY, smw_id, smw_iw, smw_iw_2 | PRIMARY | 4 | oho_wiki_es.t1.s_id | 1 | Using where | |
| 1 | SIMPLE | t4 | ref | s_id, o_id, p_id, s_id_2, s_id_3, o_id_2, o_id_3 | p_id | 8 | const, oho_wiki_es.t1.s_id | 1 | Using where | |
| 1 | SIMPLE | idst4 | eq_ref | PRIMARY, smw_id | PRIMARY | 4 | oho_wiki_es.t4.o_id | 1 |
Auxilliary Tables
No auxilliary tables used.Query Metrics
Query-Size:1Query-Depth:0
Errors and Warnings
None
,,Pi3D2: Un pequeño robot en autoconstrucción "
Feb 03, 2019 - Una de las muchas ideas que tuve navegando por la red fue la de construir mi propio pequeño robot, inspirado en R2-D2. Aquí me gustaría
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

11 Robots caseros increíbles - Geek.com
Es el siglo XXI, y nos prometieron robots. La ciencia ficción nos hizo pensar que tendríamos sirvientes automatizados en casa y en el trabajo, ocupándonos de ta...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

11 mejores kits de bricolaje para hacer un robot: ingeniería interesante
No importa si eres un niño o un adulto, siempre hay un kit de robot que puede ayudarte a comenzar a construir tu propio amigo de plástico. 28 de marzo de 2018 ¿...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

4 Robots Simples que puedes Construir
Suscribete a nuestro canal de youtube para que veas mas videos https://goo.gl/PEmAJ9 LIKE, COMPARTE Y SUSCRIBETE ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

5 robots caseros - inventos caseros
¡Suscríbete y sé un Hacktuber
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

6 Eje / Eje - Hecho en casa - Hecho en casa - Paso a paso - Robot / Brazo robot - Movimientos de prueba
Nuevo software, mira aquí: https://youtu.be/NDUFj7dmdRg La prueba se mueve ... algo más de velocidad ... Muchas gracias a Chris Annin por el ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

6 Eje / Eje - Hecho en casa - Hecho en casa - Paso a paso - Robot / Brazo robot - Nuevas pruebas de software
Nuevo video: https://youtu.be/NDUFj7dmdRg Grandes mejoras de software, muchas gracias a Chris Annin por el gran ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Ai.Frame Apollo
El Ai.Frame es un robot humanoide en miniatura de código abierto. Es versátil, tiene abundantes actualizaciones, comandos personalizables, tanto preensamblados...
Contiene Planos PDF: No
Contiene Archivos CAD: Si
Licencia: UNLIC

Amapola
Plataforma de código abierto para la creación, uso y uso compartido de robots impresos en 3D interactivos Poppy es una comunidad interdisciplinaria de principia...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: CCBY40

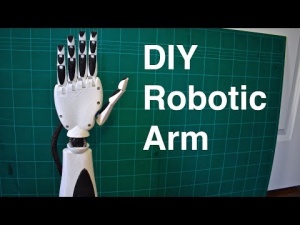
Análisis brazo robótico programable o cómo construir y programar ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Ardumower - Construyendo un robot cortacésped (parte 1)
COMPARTIR Incluso si estoy satisfecho con mi, no estaría mal renunciar a cortar el césped regularmente y que un robot haga esta tarea. Productos comerciales de...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Autodesk Robot Structural Importación DWG Importación dwg
Cómo hacer una importación de archivos de
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Banco de robots de bricolaje: cómo hacer que un robot divertido coma monedas
Cómo hacer que un robot coma motor de monedas https://goo.gl/r81ZKV.
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Brazo robot de bricolaje, cómo hacer un brazo robótico potente
Brazo robot de bricolaje, Cómo hacer un poderoso brazo robótico Videos relacionados 1. Cómo hacer un motor de CC en casa, un motor eléctrico casero ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Brazo robótico de bricolaje impreso en 3D (un prototipo protésico inicial)
Brazo robótico impreso en 3D do it yourself con servos sg90 pirateados dentro de la palma y una articulación esférica para la muñeca de rotación. Instructable:...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Bricolaje Arduino Robot Arm con control de teléfono inteligente
Impresora 3D Creality CR-10 de Banggood: https://goo.gl/B2CdfQ Circuito, Código, Modelo 3D y más detalles aquí ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Bricolaje: Construye tú mismo el robot de limpieza - Tekkie Hacks Conrad
Conrad y Tekkie Simon Bäumer del canal Kondensatorschaden muestran trucos con los que reinventa la tecnología.
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Camarero Automático
Basado en RandA, esta máquina puede preparar cócteles, extrayendo las cantidades de dispensadores dedicados, de acuerdo con las recetas descargadas de la página...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: CCBYSA40
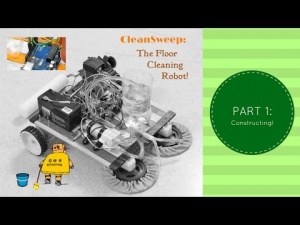
CleanSweep: el robot de limpieza de pisos - Parte 1 Construyendo Bricolaje
PARTE 1: ¡Este video mostrará las instrucciones para construir el robot Parte 2 del proyecto donde puedes ver el robot en acción: ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Clementoni My Robot Wifi Robot Build Cómo se ve fuera del episodio 5
En este episodio ¿Cómo se ve? Construí el robot desde Clementoni hasta el control wlan con la ayuda de la aplicación Blynk y ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Como Hacer Un Robot Casero En 3 Minutos Súperr Fácil
MATERIALES : Batería de 9 voltios. Motor. Palos de helado. un tornillo. cables. Interruptor. pegamento. Cautin y estaño.
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
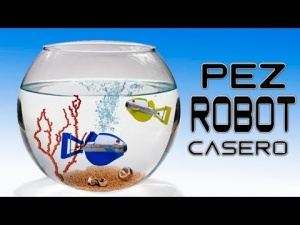
Como Hacer un Pez Robot Casero ( Sin Usar Pilas )
Como Hacer un Peces Robot Casero Sin Usar PilasDescarga plantillaLinkhttp://goo.gl/4ZpLURVÍDEOS ANTERIORES Robot Casero ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Como Hacer un Robot Casero a Control Remoto (Muy fácil de hacer )
Como hacer un robot a control remoto casero, un proyecto ideal para la clase de tecnología. Como hacer un pulsador casero ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Como Hacer una Mano Robotica en tu Casa con Carton Inventos Caseros
Como Hacer una Mano Robotica en tu Casa con Carton ? Suscríbete ? http://bit.ly/Experinventos ? Invento casero listo para ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
{kind=link}
Como construir un parque de Robots
Como construir un parque de Robots ?? http://bit.ly/BitclubNetworkRE ?? Bitclub Network España, es una red global de ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Como hacer un Robot Articulado con 12 Encendedores Vacios
Diseño Original: Alejandro Cuevas Música: BSO Bionic Commando (2008) Materiales: 12 Encendedores vacíos Herramientas: ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
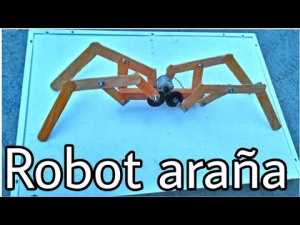
Como hacer un robot araña / casero / muy fácil de hacer
GRACIAS POR DONAR https://www.paypal.me/osgame98 suscríbete.
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
{kind=link}
Como hacer una MANO ROBOTICA con Arduino
CUPON $5 PCB"BIOMAKERS" en el siguiente link: https://www.nextpcb.com/register?code=biomakers ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construir robots ellos mismos: ¿cómo funciona? - ENCENDER
thumbup 22 C-3PO, BB-8, Wall-E: Los robots han conquistado nuestros corazones desde hace mucho tiempo en la pantalla grande y en los juegos de computadora. ¿Qui...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construya quizás el mejor garaje para el cortacésped robótico Worx Landroid (robot cortacésped)
¡Quizás el mejor garaje construido para el Worx Landroid en sí Debido a la pared lateral móvil, el garaje no solo se ve ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Construya sus primeros planes paso a paso de robots - Mecánica popular
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construye desde Make 1/16: Strandbeest robot tú mismo
Los enormes restos de playa de Theo Jansen son maravillas cinéticas. Joachim Haas tiene el mecanismo de locomoción ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construye robots con Arduino
Así es como se ensambla el robot StarterKit V2. Video de Markus Knapp y Alexander Moser de ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construye tu propio barco robot Dynamo Zurich
Robot de bricolaje. "La robótica está de moda hoy en día. Microcontroladores cada vez más baratos y potentes junto con simples ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construye tu propio disfraz robótico de cartón
¡Haz un genial disfraz robótico con viejas cajas de cartón con "Papptastisch" La autora Jemma Westing tiene 25 increíbles ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Construye tu propio robot Parte 1 - La base Héroes técnicos de Conrad
Es hora El daño del condensador comienza esta semana en la primera parte de su tan esperado robot de bricolaje, el video para ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Construye tú mismo el robot Arduino: adicto a los 5 voltios
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Construye un robot con control de Bluetooth tú mismo
Visite mi sitio web: http://stukan.de Soporte del canal de YouTube: https://www.paypal.me/AlexanderStukanLinks: http://stukan.de
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
{kind=link}
Cómo Hacer El Brazo Robótico Accionado Hidráulico Del Cartón
Cómo hacer el brazo robótico accionado hidráulico del cartón En este video te muestro cómo hacer el brazo robótico de cartón, ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
Cómo Hacer Robot WALL-E (muy fácil de hacer)
Hola este nuevo video haremos el robot WALL-E con materiales sencillos espero les guste. ?Materiales? ?Trozos de tecnopor ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer Robot de 4 Patas Casero (muy fácil de hacer)
hola amigos, en este video haremos un robot de 4 patas casero con materiales reciclados espero les guste ?materiales? ?MDF ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer Un Robot Barredor Casero
Hola amigos en este video haremos un robot barredor casero con materiales fáciles de conseguir. espero les guste. Materiales ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer Un Robot Que Pinta Solo - Experimentos Caseros by LlegaExperimentos
Hola amigos. En este vídeo vamos a verCómo Hacer Un Robot Que Pinta Solo - Experimentos Caseros by LlegaExperimentos. Se trata ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer Un Robot Triciclo Muy fácil de hacer
Hola amigos en este video haremos un robot triciclo eléctrico de cartón, espero les guste ?Facebook: https://goo.gl/uNWLZU ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer Una Araña Robot Casero, Un Robot Araña hexapodo Robotica Sagaz Perenne
¡Hola amigos en este nuevo video haremos un robot araña eléctrico un robot casero con forma de araña utilizando palitos de ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer Wall-E Robot De Cartón
Cómo Hacer Wall-E Robot De Cartón - Inventos Caseros - DIY ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida
{kind=link}
Cómo Hacer un Mini Robot Cucaracha Casero (Para Hacer Bromas)
Como hacer un mini robot casero con forma de cucaracha utilizando un motorcito vibrador de celular y demás materiales fáciles ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer un Robot Caminante Increíbles Experimentos Caseros
Hola este nuevo video haremos el robot Caminante con materiales sencillos espero les guste. Gracias por mirar y no olvides ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida

Cómo Hacer un Robot Caminante en Dos Patas (Muy fácil de hacer)
Hola en este video aprenderemos a construir un robot casero que camina en dos patas, espero les guste ?Materiales ...
Contiene Planos PDF: No
Contiene Archivos CAD: No
Licencia: desconocida